




















Open Source Glove /Wearable Mechanical Somatosensory Control Of Exoskeleton
Open Source Glove /Wearable Mechanical Somatosensory Control Of Exoskeleton
1.Description :
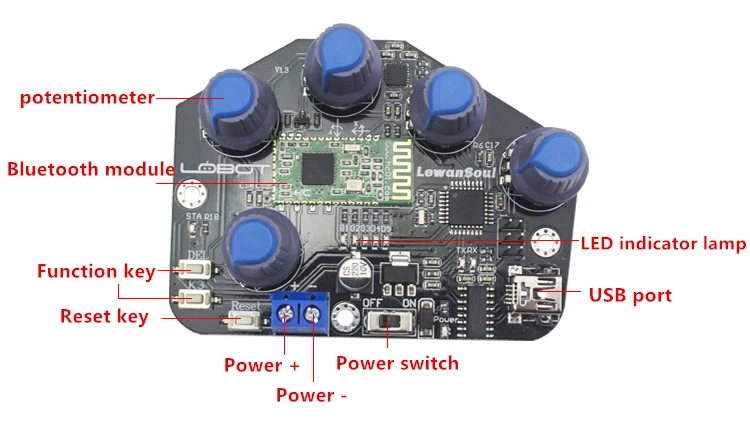
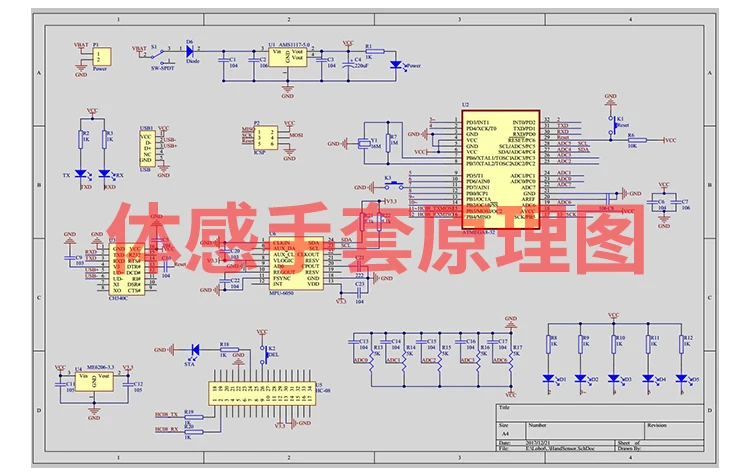
1). open source mechanical glove based on Arduino; Single chip model:ATmega328P
2.Size chart:(MM)

3.Package list:

4.Note:
1)Not include the battery and battery line. Recommended to use 7.4V, 1000mah, 20C li-battery.
Battery size:55*31*15mm. (Most countries can send batteries if you use the Aliexpress standard express,then I will send it together to you.)
2).Use this glove to control your robot, need ensure that the Bluetooth module of your robot is HC-08 based on the Bluetooth 4.0 protocol.
if need matched controller with bluetooth pls go below link:
if need matched hand pls go below link:
3).The price of all the products of our shop is without tax price by default.If the destination country needs to pay taxes, please cooperate actively to fulfill the duty of paying taxes and customs clearance. Thank you.










